INNOVATIVEAND SUSTAINABLE METHODSFOR AGRICULTURAL ROBOTICS AND OFF-ROAD MOBILITY
As part of the activities of the AgroTechnoPôle, SHERPA-Engineering (ATP Innovative Company) and the TSCF Research Unit (INRAE laboratory) have decided to establish a closer research partnership for the Development of Tools and Methods for the development of agricultural robotics by creating the i-SMART Associated Partnership Laboratory (i-SMART LPA).
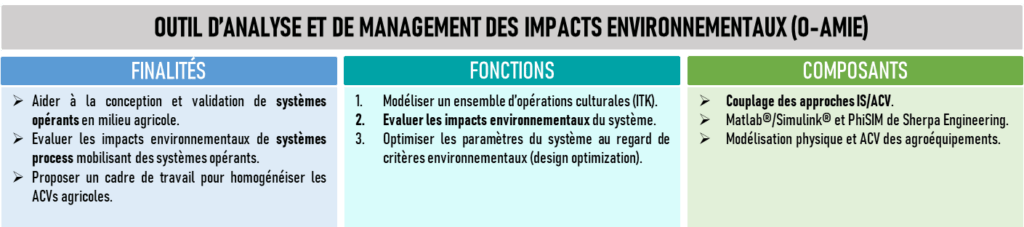
The aim of the program is to develop solutions for the design and evaluation of high-performance agricultural robotic systems that will help limit the environmental footprint of the agricultural practices that mobilize them, while meeting the necessary safety and operating performance requirements.
Once developed, these tools and methods can be offered as services to manufacturers, industry players and the scientific community.
This project responds to the growing expectations of manufacturers of agricultural machinery in general, and of agricultural robots in particular: the need for criteria for assessing the environmental impact of their new products, not only during use (e.g. impact of new low-carbon engines, use of machines in an agro-ecological context), but also during eco-design at the start of the life cycle (e.g. impact of using certain types of materials) or recycling at the end of the life cycle.
This project is a perfect example of the real complementarity between INRAE-TSCF and SHERPA-Engineering, with INRAE-TSCF’s expertise in LCA and associated description and analysis tools AND SHERPA-Engineering’s ability to model/represent machine operation at different levels (complete assemblies, specific functional sub-assemblies, specific components).
The combination of LCA and systems engineering makes it possible to offer a truly original method and tools for closely qualifying a new machine in absolute terms, but also in relative terms by comparing it with existing machines.
The tool currently being developed (O-AMIE) will be used to evaluate farming itineraries using robotized agri-equipment in comparison with conventional itineraries, whether conventional or agro-ecological.
The safety and performance of mobile agricultural and off-road robots are major concerns for all players in the industry, from manufacturers to users.
These protocols have been identified at international level within the framework of the ISO 18-497 and OECD Working Groups.
The latest ARPA 4 protocol – Tests in agricultural environments (rows of vines, trees, tall crops) for dummy detection in different configurations
developed in 2022 and presented at the ODCE day is the result of the work of the LPA i-SMART.
The aim of this project is to set up a digital twins workshop to meet the needs of the various players involved in the development of off-road robots.
The digital twins workshop currently under construction will be based on an “Open-source” Offer 1 aimed at the research community, using free software (Gazebo, Carla), and on an Offer 2 based on licensed software, mainly aimed at industry (manufacturers, equipment suppliers, etc.), while respecting the confidentiality of future external applicants/partners.
This workshop will include digital modeling of the entire Montoldre experimentation site (outdoor and indoor development zones) of the AgroTechnoPôle, common to the 2 offers above.
The digital twins workshop will be able to meet the demands of the various players involved in the development of off-road robots, adapting to each requirement in terms of modeling accuracy or simulation level (MIL, SIL, HIL). It will be based on a simulation core, the aim of which is to organize and synchronize the various existing simulation tools – including those used by customers. The robots/vehicles and associated tools can be integrated in a variety of ways using descriptive modules. It will also have a set of models for proprioceptive and exteroceptive sensors – including models of interactions with the environment for the latter. The system will also include scenario management and data-logging tools to assess the performance of robots and other vehicles in their working environments. Initial case studies (e.g. ARPA 4 trials) will illustrate the contribution and role of these new tools/virtual environments in the design and performance evaluation of agricultural machinery.
Project leader: Christophe Cariou – TSCF Research Engineer
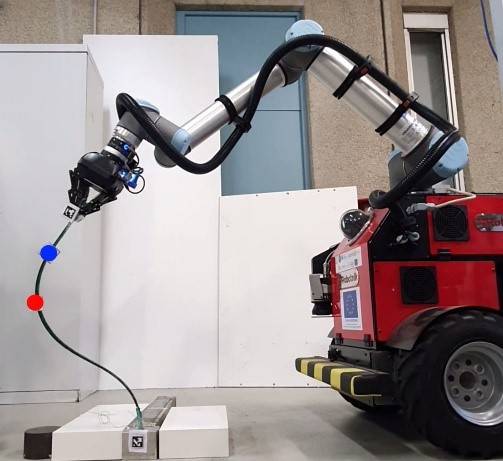
The SynCEA project focuses on the dynamic coupling of the movements of a robot’s mobile base (ground movement) with the movements of its on-board manipulator arm.
The application challenges related to dynamic synchronization of the robot’s rolling base with its manipulator arm(s) in complex, random and dynamic environments are high-potential.
Project leaders: Sandro BIMONTE (Research Director UR TSCF) and Nicolas Tricot (Research Officer UR TSCF)
Today’s agricultural robot manufacturers are well aware of the need to go beyond the physical robot, and to associate various software tools with their machines (for example, to automatically map plots, collect data and thus enrich knowledge bases linked to the movements of the robot(s) and data linked to associated tools, ensure remote monitoring, etc.).
As the range of robotic products expands to perform different tasks throughout the production cycle, robot end-users will in future be less and less satisfied with captive solutions (hardware and software from a single manufacturer), which are the only ones available today in a nascent market.
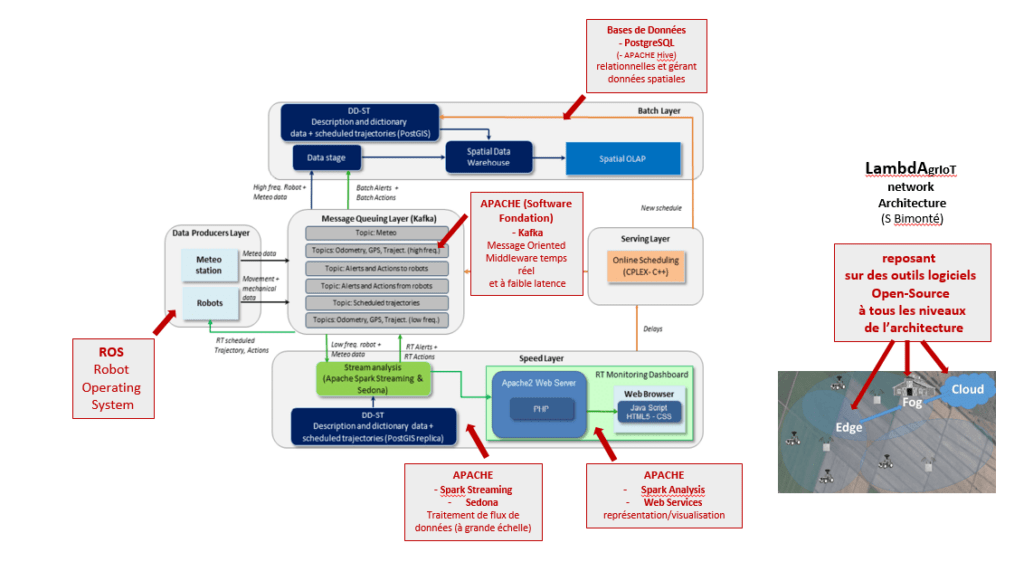
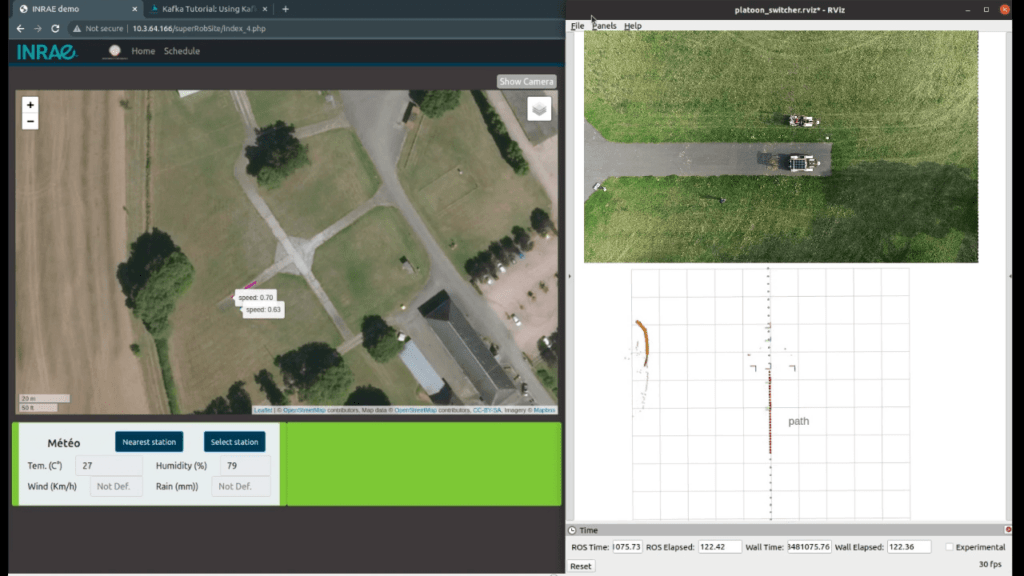
From 2020 to 2022, the Clermont-Ferrand CAP20-25 I-SITE (led by the Université Clermont-Auvergne and involving various academic partners) supported the SupeRob project, then SEMCAR, involving INRAE’s TSCF Research Unit, UCA’s LIMOS laboratory and international partners (Italy, Tunisia). A first skeleton of a generic architecture for real-time monitoring of autonomous agricultural robots and other IoT data has been produced, called LambdAgrioT. This architecture is made up of three main layers (Edge, Fog, Cloud) that enable it to analyze data in real time, coordinate data from different devices and vehicles, and store and analyze historical data. LambdAgrIoT enables real-time monitoring and control of robot activities and management in an open source environment/system. It allows all types of robots and sensors to be integrated into this management/supervision system. This open-source architecture represents a first step towards a flexible, interoperable data management system for robots.
In 2022, INRAE-TSCF and SHERPA-Engineering, as part of their joint i-SMART laboratory, will be working on a fourth protocol.
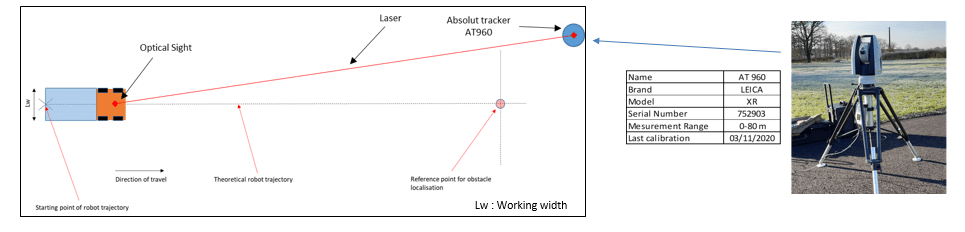
This test uses a laser tracker to achieve spatial accuracy (X,Y,Z) of 10 micrometres at an acquisition frequency of 1 kHz.
The perception systems are placed statically at the end of a tunnel, either on a support provided for this purpose, or directly on the vehicle. Different types and types of obstacle are placed at different distances from the sensors to be tested.
The AgroTechnoPôle platform also offers the possibility of carrying out tests on the behaviour of “autonomous” or “non-autonomous” vehicles and agricultural machinery, thanks to the different development zones available on the Montoldre experimental site.
(negative and positive obstacles, fixed and mobile, rows of artificial vegetation of various types, etc.)
(ISO 5008 excitation tracks) (e.g. calibration of perception systems, dynamic behaviour, etc.)