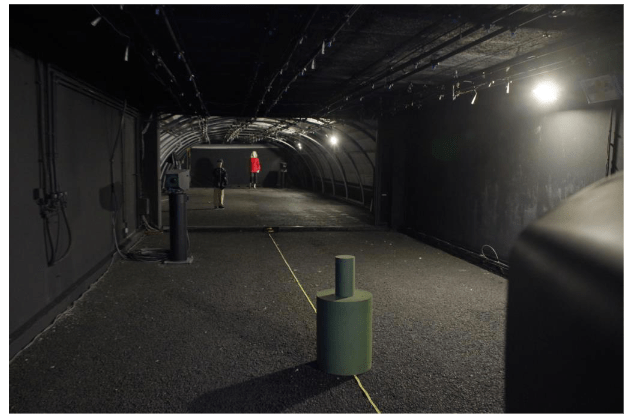


La plateforme PAVIN Pluie & Brouillard du CEREMA située à Clermont-Ferrand est une installation unique pouvant simuler des conditions artificielles et maîtrisées de pluie et de brouillard en grandeur nature. Ces moyens et les compétences associées du partenaire académique CEREMA peuvent être mobilisés par l’’AgroTechnoPôle afin de répondre à toutes sollicitations de recherche et/ou d’essais